
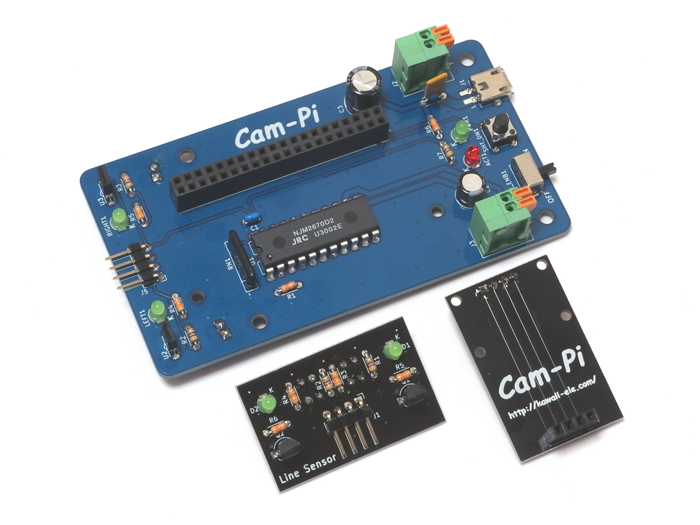
このページではRaspberry Pi Zeroとタミヤの「カムプログラムロボット」を動かすためのオリジナル拡張基板「Cam-Pi」をご紹介します。
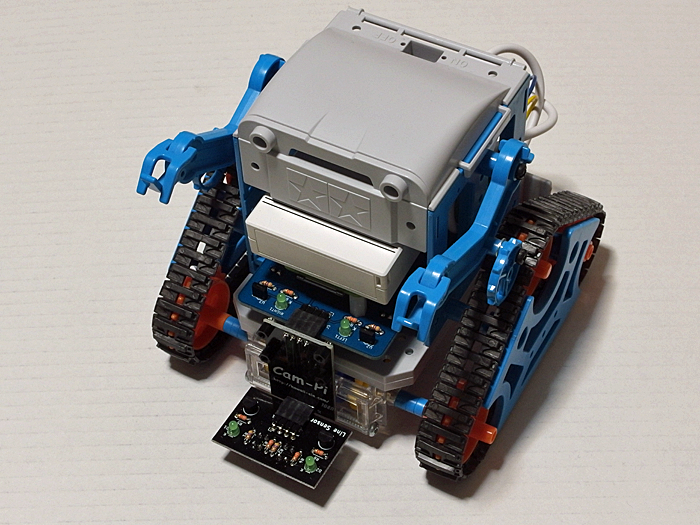
「Cam-Pi」には以下のような特徴があります。
・Raspberry Pi Zero WHのIOピンで制御するモータードライバIC搭載
・前方の障害物を検知する赤外線センサー搭載
・床面の黒線を検知するラインセンサー搭載
・Raspberry Pi純正のカメラモジュールを取り付け可能
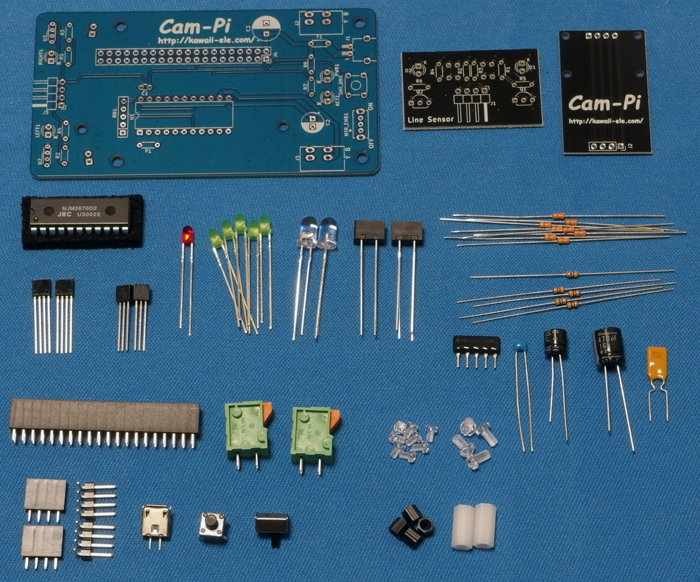
「Cam-Pi」は基板と電子部品がセットになった組み立てキットです。使う前に基板に電子部品をはんだ付けする必要があります。組み立てには「はんだごて」、「はんだ」、「ニッパー」、「ピンセット」、「ラジオペンチ」などの工具が必要ですので、あらかじめ準備しておいてください。
「Cam-Pi」に含まれている部品のリストは以下の通りです。
部品リスト
| 部品名 | 型番・規格 | 個数 |
| ピンソケット | 2.54mmピッチ 2×20ピン | 1 |
| コネクタ | 2.54mmピッチ 1×4ピン | 2 |
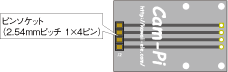
| ピンソケット | 2.54mmピッチ 1×4ピン | 2 |
| コネクタ | マイクロUSBコネクタ | 1 |
| IC | S6809 | 2 |
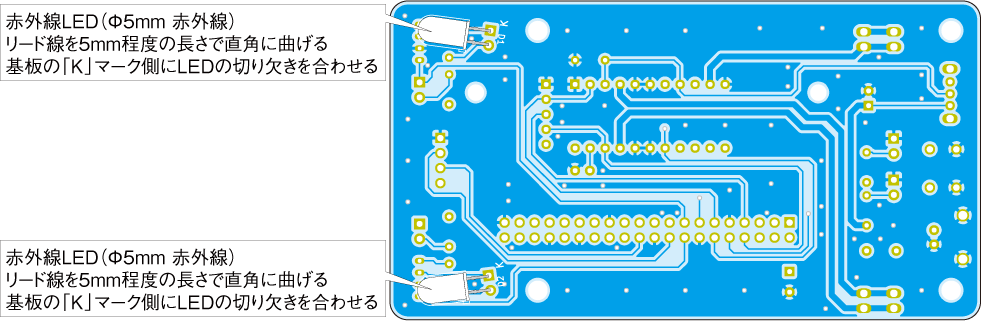
| 赤外線LED | Φ5mm 赤外線 | 2 |
| トランジスタ | 2SC1815L-Y | 2 |
| IC | NJM2670D2 | 1 |
| LED | Φ3mm 赤 | 1 |
| LED | Φ3mm 緑 | 5 |
| リセッタブルヒューズ | 1.1A | 1 |
| ターミナルブロック | TB401-1-2-E | 2 |
| タクトスイッチ | □6mmタクトスイッチ | 1 |
| コンデンサ | 0.1uF | 1 |
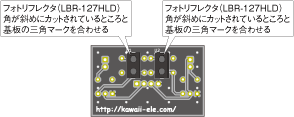
| フォトリフレクタ | LBR-127HLD | 2 |
| 電解コンデンサ | 470uF/16V | 1 |
| スイッチ | スライドスイッチ | 1 |
| 電解コンデンサ | 100uF/16V | 1 |
| 抵抗 | 10kΩ×4素子 | 1 |
| 抵抗 | 33kΩ(橙橙橙金) | 8 |
| 抵抗 | 470Ω(黄紫茶金) | 5 |
| スペーサ | M2×4mm | 4 |
| スペーサ | M2.6×11mm | 2 |
| ネジ | M2×3mm | 8 |
| ネジ | M2.6×5mm | 4 |
| Cam-Pi基板 | 100×54mm | 1 |
| ラインセンサー基板 | 40×25mm | 1 |
| 中継基板 | 40×25mm | 1 |
※組み立てを始める前に不足部品がないことを確認してください。
部品の実装
各基板の組み立ては基板実装図にしたがってください。一部の部品には極性がありますので、間違えないように注意してください。
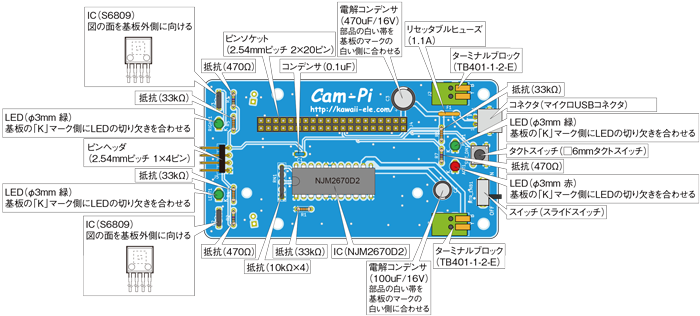
(大きな画像を見る)
{kind=link}
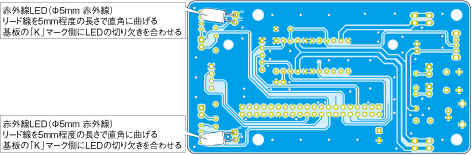
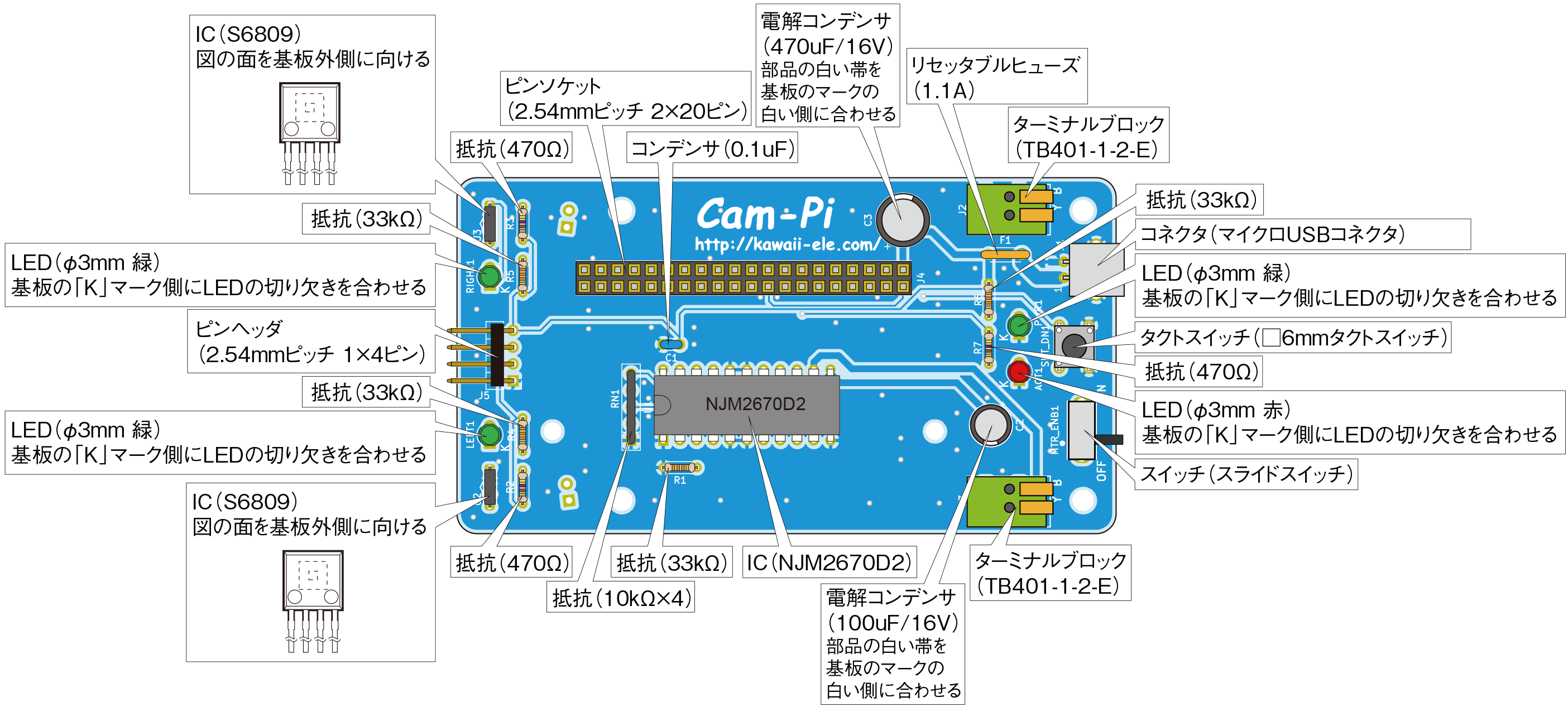
Cam-Pi基板ハンダ面実装図
(大きな画像をみる)
{kind=link}
| 部品番号 | 部品名 | 型番 | 個数 | 備考 |
| ACT1 | LED | Φ3mm 赤 | 1 | 極性あり |
| C1 | コンデンサ | 0.1uF | 1 | |
| C2 | 電解コンデンサ | 100uF/16V | 1 | 極性あり |
| C3 | 電解コンデンサ | 470uF/16V | 1 | 極性あり |
| D1, D2 | 赤外線LED | Φ5mm 赤外線 | 2 | 極性あり |
| F1 | リセッタブルヒューズ | 1.1A | 1 | |
| J1 | コネクタ | マイクロUSBコネクタ | 1 | |
| J2, J3 | ターミナルブロック | TB401-1-2-E | 2 | |
| J4 | ピンソケット | 2.54mmピッチ 2×20ピン | 1 | |
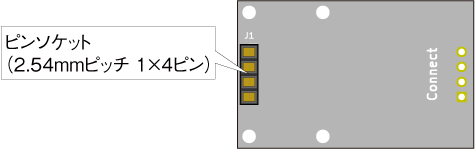
| J5 | ピンヘッダ | 2.54mmピッチ 1×4ピン | 1 | |
| MTR_ENB1 | スイッチ | スライドスイッチ | 1 | |
| LEFT1, PWR1, RIGHT1 | LED | Φ3mm 緑 | 3 | 極性あり |
| R1, R4, R5, R6 | 抵抗 | 33kΩ(橙橙橙金) | 4 | |
| R2, R3, R7 | 抵抗 | 470Ω(黄紫茶金) | 3 | |
| RN1 | 抵抗 | 10kΩ×4素子 | 1 | |
| SHT_DN1 | タクトスイッチ | □6mmタクトスイッチ | 1 | |
| U1 | IC | NJM2670D2 | 1 | 極性あり |
| U2, U3 | IC | S6809 | 2 | 極性あり |
(大きな画像を見る)
{kind=link}
(大きな画像を見る)
{kind=link}
| 部品番号 | 部品名 | 型番 | 個数 | 備考 |
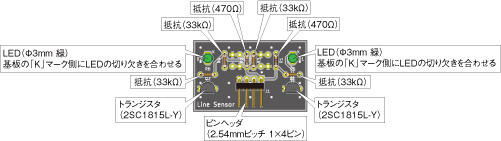
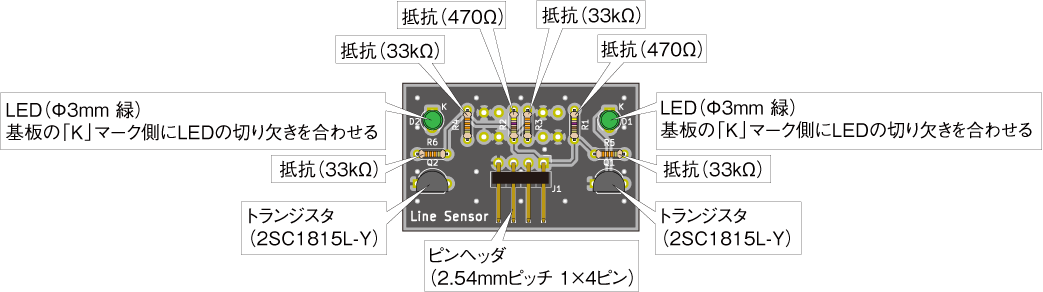
| D1, D2 | LED | Φ3mm 緑 | 2 | 極性あり |
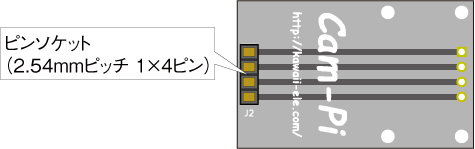
| J1 | コネクタ | 2.54mmピッチ 1×4ピン | 1 | |
| Q1, Q2 | トランジスタ | 2SC1815L-Y | 2 | 極性あり |
| R1, R2 | 抵抗 | 470Ω(黄紫茶金) | 2 | |
| R3, R4, R5, R6 | 抵抗 | 33kΩ(橙橙橙金) | 4 | |
| U1, U2 | フォトリフレクタ | LBR-127HLD | 2 | 極性あり |
(大きな画像を見る)
{kind=link}

(大きな画像を見る)
{kind=link}
※ピンソケットと基板が直角になるようにハンダ付けしてください。
| 部品番号 | 部品名 | 型番 | 個数 | 備考 |
| J1 J2 | ピンソケット | 2.54mmピッチ 1×4ピン | 2 |
カムプログラムロボットの組み立て方、「CamーPi」の組み込み方、「Cam-Pi」の基本的な使い方はリックテレコム社発行の書籍「ラズパイZero 工作ブック」を参照してください。
本製品をカムプログラムロボットに組み込んで操作させるには以下のものが必要ですので、別途ご用意ください。
・カムプログラムロボット 1台
・Raspberry Pi Zero WH 1枚
・モバイルバッテリー 1台
※cheero社 CHE-061-IOT など、カムプログラムロボットのおなかに収まるサイズのもの。
・マジックテープ 1枚(モバイルバッテリーの固定用)
Raspberry Pi Zero WHの端子設定
CamーPiをRaspberry Pi Zero WHに接続して電源を入れると、Cam-Pi基板上のLED(LEFT1、RIGHT1)とラインセンサー基板上のLED(D1、D2)がうっすらと点灯します。これはRaspberry Pi Zero WHのGPIOの初期設定でプルダウン抵抗が有効になっているためです。
LEDを完全に消灯させるためにはGPIOの初期設定を変更する必要があります。それには「boot」フォルダ内の「config.txt」ファイルの最終行に以下の記述を追加します。
gpio=22-25=np
この記述を追加した後、Raspberry Pi Zero WHを再起動し、この設定が有効になるとLEDが消灯します。なお、「config.txt」ファイルを編集するときは管理者権限が必要となるので、以下のようにコマンドを実行してください
sudo nano /boot/config.tx
「ACT1」LEDと「SHT_DN1」スイッチの使い方
Cam-Piに搭載されている「ACT1」LEDと「SHT_DN1」スイッチの使い方の一例をご紹介します。ここでは「ACT1」LEDをRaspberry Pi Zero WHの動作状態を示すためのLEDとし、「SHT_DN1」ボタンをRaspberry Pi Zero WHをシャットダウンするためのスイッチとして設定します。
以下のようなプログラムをファイル名 「shutdown.py」として任意のフォルダ内(例えば/home/pi/scriptなど)に作成します
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
from gpiozero import Button, LED, DigitalInputDevice
from subprocess import check_call
from signal import pause
def shutdown():
led.off()
check_call([‘sudo’, ‘poweroff’])
led = LED(27)
led.on()
shutdown_btn = Button(15, hold_time=2)
try:
shutdown_btn.when_held = shutdown
except Interrupt:
shutdown()
pause()
このファイルが起動時に実行されるように「/etc/rc.local」ファイルに記述します。
sudo nano /etc/rc.local
最終行の「exit 0」の前に以下を追加します。
/usr/bin/python3 /home/pi/script/shutdown.py &
このファイルが実行されると「ACT1」LEDが点灯します。
Raspberry Pi Zero WHの起動後、「SHT_DN1」スイッチを2秒以上押し続けると「ACT1」LEDが消灯し、Raspberry Pi Zero WHがシャットダウンします。
「Cam-Pi」はスイッチサイエンスで購入できます。
・購入ページ